
This week’s BEACON Researchers at Work blog post is by MSU Visiting Scholar René Draschwandtner.
René after a BEACON seminar
Guten Tag, god dag, and good day to all readers. I am René Draschwandtner, a visiting scholar from Salzburg, Austria, although I came to Michigan State University and BEACON by way of Stockholm, Sweden. More on that circuitous route shortly. Since March I have been investigating the behavior of snake-like aquatic robots in Prof. Philip McKinley’s research group. My research involves integrating behaviors observed in animals with the search capability of evolutionary algorithms, enabling robots to conduct complex tasks efficiently.
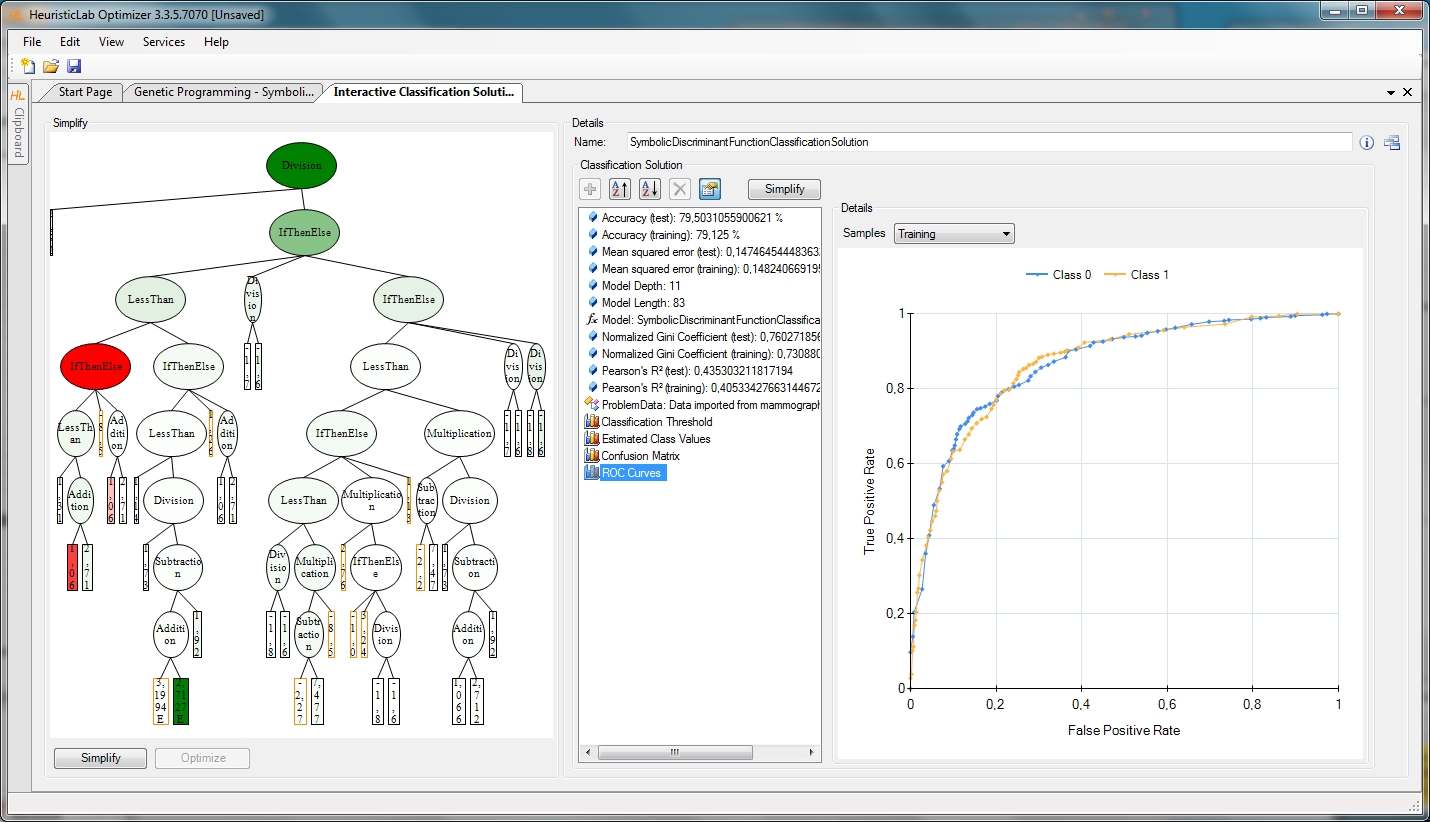
Genetic Programming output with HeuristicLab.
The first time I encountered evolutionary computation (EC) was at the University of Applied Sciences Upper Austria (UASUA), where I earned a master’s degree in Biomedical Informatics. Ever since I attended a lecture on EC, I have been excited about applying mechanisms from natural evolution to computer algorithms. Especially intriguing to me is exploiting the search capabilities of genetic algorithms for parameter optimization. While at UASUA, I conducted a course project, supervised by Prof. Michael Affenzeller and Prof. Stephan Winkler, where we examined human blood data with evolutionary algorithms in order to find so called Virtual Tumor Markers [1]. We used HeuristicLab, a user-friendly open source tool developed by the Heuristic and Evolutionary Algorithms Laboratory (HEAL), to conduct evolutionary experiments with different parameter settings. Specifically, we explored the effect of different evolutionary parameters on producing Tumor Marker estimation models.

René enjoying the midday sun on a frozen lake above the Arctic Circle.
After graduation, I immediately enrolled for a second master’s program at UASUA, this time in Information Engineering and Management. I was particularly interested in how the natural sciences, including topics such as evolution, can inform business computation. Especially, the usage of machine learning methods in conjunction with data warehouses in order to generate and predict key figures was one of my favorite topics during my studies. A student exchange program with Stockholm University took me to Sweden in fall 2014. There, I focused on data mining and IT management. The focus on business-IT alignment and IT strategy broadened my mindset beyond my academic knowledge. By the way, if you ever visit Sweden, I highly recommend crossing the Arctic Circle! The frigid and untamed environment is breathtaking.
As I finished my studies in the business domain, I continued to be interested in evolutionary computing in other areas. This led me to another exciting area of study, evolutionary robotics, where evolutionary algorithms are used to produce behaviors, and even bodies, of robots. I wrote a proposal on evolving aquatic robots and submitted it to the Austrian Marshall Plan Foundation. Luckily, the proposal was funded, enabling me to come to Michigan State University and the BEACON Center to complete my final thesis. In addition to Prof. McKinley, I am collaborating closely with Anthony Clark and Jared Moore, who have applied evolutionary computation to several aspects of aquatic robots. Particularly, their work has explored the evolution of behavior in computer simulations [2] and optimization of flexible caudal fins for robotic fish [3].
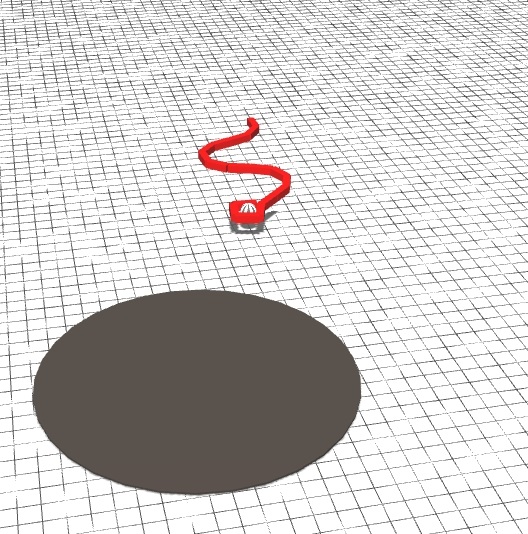
Robot with evolved gaits transporting payload to a destination region. A video can be seen at https://youtu.be/xWSVBTm4m3c.
My research project investigates the locomotion behavior of a snake-like robot consisting of several rigid links, in an aquatic environment. The project is based on the idea of creating complex behavior by composing several simple motions, namely the actuation of joints. The task for the simulated robot is to capture and transport a payload to a target. This behavior is useful in the real world such as rescuing an arbitrary shaped object floating in the water. For example, a rescue team on a boat could launch the robot, which would then swim to the object, grasp it, and deliver it to a destination area. Further, the robot would perform these subtasks by simply deforming its body in different ways, without the need for an external propeller or a specialized grasping apparatus.
A key aspect of my approach is to engineer certain behaviors, drawing on the literature, but use evolutionary computation to refine individual behaviors and combine primitive behaviors to form more complex ones. In nature, snake-like animals propagate sinusoidal waves through their bodies in order to generate forward velocity. This behavior is relatively easy to code manually, but we apply evolution to tune parameters so as to maximize performance. Similarly, we can encode a behavior for the snake to grasp an object, but use evolution to determine the precise timing of the grasping maneuver as the robot approaches the object.
My five-month visit to MSU and BEACON will end in late July, after which I will graduate from UASUA. Not only will I be happy to have finished my studies, but I will be able to look back on extraordinary times in Sweden and Michigan.
[1] Winkler, S. M., Affenzeller, M., Kronberger, G. K., Kommenda M., Wagner S., Jacak W., and Stekel H. (2013). On the Identification of Virtual Tumor Markers and Tumor Diagnosis Predictors Using Evolutionary Algorithms. Advanced Methods and Applications in Computational Intelligence, Topics in Intelligent Engineering and Informatics, Vol. 6, 95-122.
[2] Moore, J. M., Clark, A. J., and McKinley, P. K. (2013). Evolution of station keeping as a response to flows in an aquatic robot. Proceedings of the 15th annual conference on Genetic and evolutionary computation: 239-246.
[3] Clark, A. J., Moore, J. M., Wang, J., Tan, X., and McKinley, P. K. (2012). Evolutionary design and experimental validation of a flexible caudal fin for robotic fish. Proceedings of the Thirteenth International Conference on the Synthesis and Simulation of Living Systems: 325-332.
For more information about René’s work, you can contact him at rdraschwandtner at hotmail dot com.
