
This week’s BEACON Researchers at Work post is by MSU postdoc Bjørn Østman, and is also posted on his research website.
What do real fitness landscapes look like? Do they look more like the image on the left, a nearly-neutral holey fitness landscape, or the one on the right, a rugged fitness landscape with many distinct peaks?
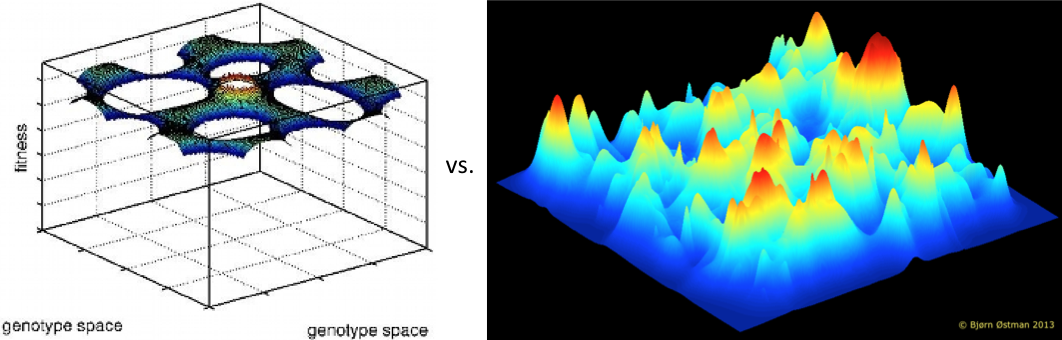
Those are only in two dimensions, so the question is also if depicting anything in two dimensions conveys intuitions that are at all correct.
Holey fitness landscapes (Gavrilets and Gravner, 1997, Gavrilets 1997) are approximations of real fitness landscapes where all genotypes are assigned a fitness value of either zero or one. After normalizing fitnesses to be between zero and one, those that lower than one are assigned a fitness of zero1. Because real fitness landscapes are of extremely high dimensionality2, and assuming that genotypes have fitnesses that are randomly distributed3, it follows that there exist a nearly-neutral network on genotypes connected by single mutations that has fitness (effectively) equal to one.
The proposition is then that this holey landscape model is a good approximation of real fitness landscapes. It hypothesizes that the evolutionary dynamics on real fitness landscapes is similar to that on holey landscapes, and that distinct peaks like in the image on the right do not really exist. And this is a testable prediction.
Take a look at these videos. They depict populations evolving in two-dimensional fitness landscapes at a very high mutation rate. (You can also download the videos from my research website.)
In all three cases the population size is 2304 (that’s (3*16)2, in case you’re wondering), mutation rate is 0.5, the grid is 200×200 pixels (i.e. genotypes), and mutations cause organisms to move to a neighboring pixel. Ten percent of the population is killed every computational update (which gives an approximate generation time of 10 updates), and those dead individuals are replaced by offspring from the survivors selected with a probability proportional to fitness (asexual reproduction). Top: neutral landscape where all genotypes have the same fitness. Middle: Half-holey landscape with square holes of 10% lower fitness (size of holes is 14×14 pixels). Bottom: Holey landscape where the genotypes in the holes have fitness zero.
The proposition is that the dynamics of the populations should be the same no matter how deep the holes are. The populations in the half-holey and in the holey landscapes should evolve in comparable ways if the holey landscape is a good approximation.
So what do you think?
What I think is that the evolving population in the top (neutral) and middle (half-holey) landscapes resemble each other, whereas they look nothing like the bottom (holey) landscape. In the half-holey landscape the population takes advantage of the holes all the time, meaning that many individuals who are in them reproduce, even though they have a clear fitness disadvantage. The lesson is that being disadvantaged is just okay, and populations can easily cross quite deep valleys in the fitness landscape. But obviously not when the valleys consist of genotype with zero fitness; evolution in holey landscapes are much impeded compared to rugged landscapes, which is why I think they are not a good approximation.
Caveats: These populations are evolving at a very high mutation rate. When I redid it with a much lower mutation rate (0.05), the neutral and half-holey landscapes stop resembling each other, and the half-holey and holey landscapes look more alike. However, evolution happens so slowly in this case that it is difficult to distinguish the dynamics, so the matter is unresolved so far (however, I have other evidence that lower and more realistic mutation rates do not change this conclusion – some preliminary data in √òstman and Adami (2013)). A second caveat is that the whole holey landscape idea relies on the fitness landscape being multidimensional, and so how can I even allow myself to compare evolution of populations in half-holey and holey landscapes in just two dimensions? That is valid question: the intuitions we get from these animations may lead us to think we know something about evolution in multi-dimensional landscapes, while the original premise of Gavrilets’ idea was that we exactly cannot. Unfortunately, while this is an empirical question – meaning that it could be tested – the holey landscape model posits that the neutral network appears at very high dimensionality. What this dimensionality is is unclear, so even if I were to evolve populations in 2,000 dimensions (which is not computationally feasible – the limit is a little over 30 binary loci), one could always claim that not even that many are enough. Sighs.
1 Genotypes with fitness greater than 1 divided by the population size, N, are effectively the same, because selection cannot “see” differences smaller than 1/N.
2 High dimensionality means a large number of genes (loci) or number of nucleotides.
3 We already know that this is not a very good assumption, as there are indications that fitness landscapes are non-randomly structured with high fitness genotypes clustered with other fit genotypes (Østman et al, 2010), but we don’t know if it is enough to render the holey landscape model useless.
References
Gavrilets S, and Gravner J (1997). Percolation on the fitness hypercube and the evolution of reproductive isolation. Journal of theoretical biology, 184 (1), 51-64 PMID: 9039400
Gavrilets S (1997). Evolution and speciation on holey adaptive landscapes. Trends in ecology & evolution, 12 (8), 307-12 PMID: 21238086
Østman B and Adami C (2013). Predicting evolution and visualizing high-dimensional fitness landscapes, in Recent Advances in the Theory and Application of Fitness Landscapes” (A. Engelbrecht and H. Richter, eds.). Springer Series in Emergence, Complexity, and Computation DOI: 10.1007/978-3-642-41888-4_18
